Loading...
Searching...
No Matches
dart::dynamics::detail::JointProperties Struct Reference
#include <JointAspect.hpp>
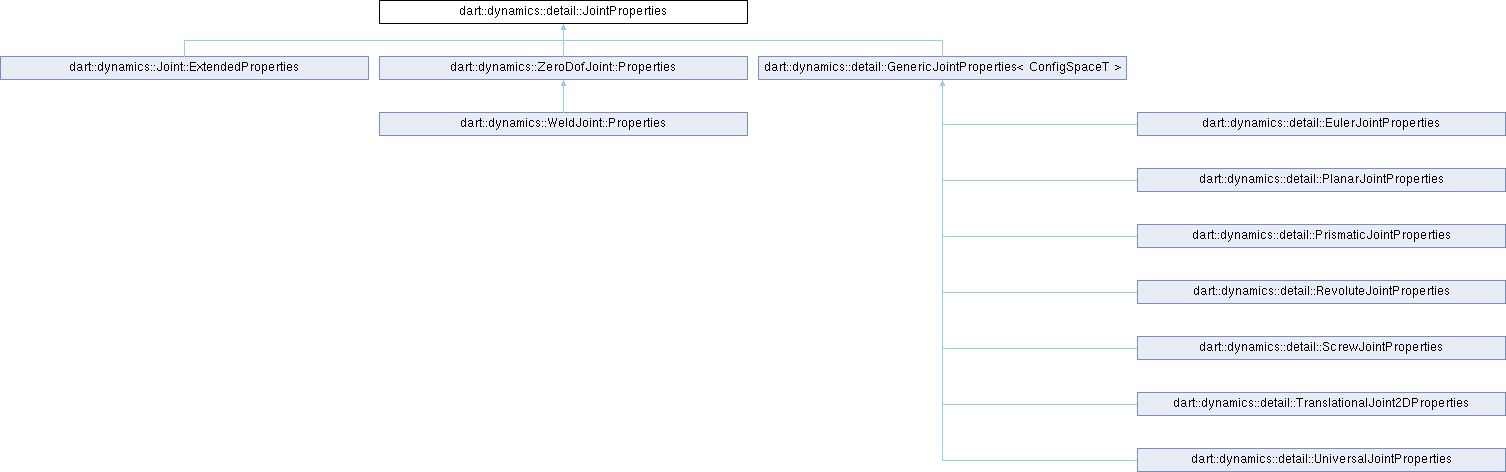
Inheritance diagram for dart::dynamics::detail::JointProperties:
Public Member Functions | |
| JointProperties (const std::string &_name="Joint", const Eigen::Isometry3d &_T_ParentBodyToJoint=Eigen::Isometry3d::Identity(), const Eigen::Isometry3d &_T_ChildBodyToJoint=Eigen::Isometry3d::Identity(), bool _isPositionLimitEnforced=false, ActuatorType _actuatorType=DefaultActuatorType, const Joint *_mimicJoint=nullptr, double _mimicMultiplier=1.0, double _mimicOffset=0.0) | |
| Constructor. | |
| virtual | ~JointProperties ()=default |
Public Attributes | |
| std::string | mName |
| Joint name. | |
| Eigen::Isometry3d | mT_ParentBodyToJoint |
| Transformation from parent BodyNode to this Joint. | |
| Eigen::Isometry3d | mT_ChildBodyToJoint |
| Transformation from child BodyNode to this Joint. | |
| bool | mIsPositionLimitEnforced |
| True if the joint position or velocity limits should be enforced in dynamic simulation. | |
| ActuatorType | mActuatorType |
| Actuator type. | |
| const Joint * | mMimicJoint |
| Mimic joint. | |
| double | mMimicMultiplier |
| Mimic joint properties. | |
| double | mMimicOffset |
Constructor & Destructor Documentation
◆ JointProperties()
| dart::dynamics::detail::JointProperties::JointProperties | ( | const std::string & | _name = "Joint", |
| const Eigen::Isometry3d & | _T_ParentBodyToJoint = Eigen::Isometry3d::Identity(), |
||
| const Eigen::Isometry3d & | _T_ChildBodyToJoint = Eigen::Isometry3d::Identity(), |
||
| bool | _isPositionLimitEnforced = false, |
||
| ActuatorType | _actuatorType = DefaultActuatorType, |
||
| const Joint * | _mimicJoint = nullptr, |
||
| double | _mimicMultiplier = 1.0, |
||
| double | _mimicOffset = 0.0 |
||
| ) |
Constructor.
◆ ~JointProperties()
|
virtualdefault |
Member Data Documentation
◆ mActuatorType
| ActuatorType dart::dynamics::detail::JointProperties::mActuatorType |
Actuator type.
◆ mIsPositionLimitEnforced
| bool dart::dynamics::detail::JointProperties::mIsPositionLimitEnforced |
True if the joint position or velocity limits should be enforced in dynamic simulation.
◆ mMimicJoint
| const Joint* dart::dynamics::detail::JointProperties::mMimicJoint |
Mimic joint.
◆ mMimicMultiplier
| double dart::dynamics::detail::JointProperties::mMimicMultiplier |
Mimic joint properties.
◆ mMimicOffset
| double dart::dynamics::detail::JointProperties::mMimicOffset |
◆ mName
| std::string dart::dynamics::detail::JointProperties::mName |
Joint name.
◆ mT_ChildBodyToJoint
| Eigen::Isometry3d dart::dynamics::detail::JointProperties::mT_ChildBodyToJoint |