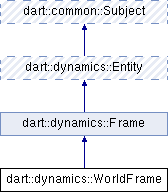
The WorldFrame class is a class that is used internally to create the singleton World Frame. More...
#include <Frame.hpp>
Public Types | |
| using | EntitySignal = common::Signal< void(const Entity *)> |
| using | FrameChangedSignal = common::Signal< void(const Entity *, const Frame *_oldFrame, const Frame *_newFrame)> |
| using | NameChangedSignal = common::Signal< void(const Entity *, const std::string &_oldName, const std::string &_newName)> |
Public Member Functions | |
| const Eigen::Isometry3d & | getRelativeTransform () const override final |
| Always returns the Identity Transform. | |
| const Eigen::Vector6d & | getRelativeSpatialVelocity () const override final |
| Always returns a zero vector. | |
| const Eigen::Vector6d & | getRelativeSpatialAcceleration () const override final |
| Always returns a zero vector. | |
| const Eigen::Vector6d & | getPrimaryRelativeAcceleration () const override final |
| Always returns a zero vector. | |
| const Eigen::Vector6d & | getPartialAcceleration () const override final |
| Always returns a zero vector. | |
| const std::string & | setName (const std::string &name) override final |
| Set name. | |
| const std::string & | getName () const override final |
| Return the name of this Entity. | |
| const Eigen::Isometry3d & | getWorldTransform () const |
| Get the transform of this Frame with respect to the World Frame. | |
| Eigen::Isometry3d | getTransform (const Frame *_withRespectTo=Frame::World()) const |
| Get the transform of this Frame with respect to some other Frame. | |
| Eigen::Isometry3d | getTransform (const Frame *withRespectTo, const Frame *inCoordinatesOf) const |
| Get the transform of this Frame with respect to some other Frame. | |
| const Eigen::Vector6d & | getSpatialVelocity () const |
| Get the total spatial velocity of this Frame in the coordinates of this Frame. | |
| Eigen::Vector6d | getSpatialVelocity (const Frame *_relativeTo, const Frame *_inCoordinatesOf) const |
| Get the spatial velocity of this Frame relative to some other Frame. | |
| Eigen::Vector6d | getSpatialVelocity (const Eigen::Vector3d &_offset) const |
| Get the spatial velocity of a fixed point in this Frame. | |
| Eigen::Vector6d | getSpatialVelocity (const Eigen::Vector3d &_offset, const Frame *_relativeTo, const Frame *_inCoordinatesOf) const |
| Get the spatial velocity of a fixed point in this Frame. | |
| Eigen::Vector3d | getLinearVelocity (const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Get the linear portion of classical velocity of this Frame relative to some other Frame. | |
| Eigen::Vector3d | getLinearVelocity (const Eigen::Vector3d &_offset, const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Get the linear velocity of a point that is fixed in this Frame. | |
| Eigen::Vector3d | getAngularVelocity (const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Get the angular portion of classical velocity of this Frame relative to some other Frame. | |
| const Eigen::Vector6d & | getSpatialAcceleration () const |
| Get the total spatial acceleration of this Frame in the coordinates of this Frame. | |
| Eigen::Vector6d | getSpatialAcceleration (const Frame *_relativeTo, const Frame *_inCoordinatesOf) const |
| Get the spatial acceleration of this Frame relative to some other Frame. | |
| Eigen::Vector6d | getSpatialAcceleration (const Eigen::Vector3d &_offset) const |
| Get the spatial acceleration of a fixed point in this Frame. | |
| Eigen::Vector6d | getSpatialAcceleration (const Eigen::Vector3d &_offset, const Frame *_relativeTo, const Frame *_inCoordinatesOf) const |
| Get the spatial acceleration of a fixed point in this Frame. | |
| Eigen::Vector3d | getLinearAcceleration (const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Get the linear portion of classical acceleration of this Frame relative to some other Frame. | |
| Eigen::Vector3d | getLinearAcceleration (const Eigen::Vector3d &_offset, const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Eigen::Vector3d | getAngularAcceleration (const Frame *_relativeTo=Frame::World(), const Frame *_inCoordinatesOf=Frame::World()) const |
| Get the angular portion of classical acceleration of this Frame relative to some other Frame. | |
| const std::set< Entity * > & | getChildEntities () |
| Get a container with the Entities that are children of this Frame. | |
| const std::set< const Entity * > | getChildEntities () const |
| Get a container with the Entities that are children of this Frame. | |
| std::size_t | getNumChildEntities () const |
| Get the number of Entities that are currently children of this Frame. | |
| const std::set< Frame * > & | getChildFrames () |
| Get a container with the Frames that are children of this Frame. | |
| std::set< const Frame * > | getChildFrames () const |
| Get a container with the Frames that are children of this Frame. | |
| std::size_t | getNumChildFrames () const |
| Get the number of Frames that are currently children of this Frame. | |
| bool | isShapeFrame () const |
| Returns true if this Frame is a ShapeFrame. | |
| virtual ShapeFrame * | asShapeFrame () |
| Convert 'this' into a ShapeFrame pointer if Frame is a ShapeFrame, otherwise return nullptr. | |
| virtual const ShapeFrame * | asShapeFrame () const |
| Convert 'const this' into a ShapeFrame pointer if Frame is a ShapeFrame, otherwise return nullptr. | |
| bool | isWorld () const |
| Returns true if this Frame is the World Frame. | |
| virtual void | dirtyTransform () override |
| Notify the transformation updates of this Frame and all its children are needed. | |
| virtual void | dirtyVelocity () override |
| Notify the velocity updates of this Frame and all its children are needed. | |
| virtual void | dirtyAcceleration () override |
| Notify the acceleration updates of this Frame and all its children are needed. | |
| Frame * | getParentFrame () |
| Get the parent (reference) frame of this Entity. | |
| const Frame * | getParentFrame () const |
| Get the parent (reference) frame of this Entity. | |
| bool | descendsFrom (const Frame *_someFrame) const |
| Returns true if and only if this Entity is itself (i.e. | |
| bool | isFrame () const |
| True iff this Entity is also a Frame. | |
| bool | isQuiet () const |
| Returns true if this Entity is set to be quiet. | |
| virtual void | notifyTransformUpdate () |
| Notify the transformation update of this Entity that its parent Frame's pose is needed. | |
| bool | needsTransformUpdate () const |
| Returns true iff a transform update is needed for this Entity. | |
| virtual void | notifyVelocityUpdate () |
| Notify the velocity update of this Entity that its parent Frame's velocity is needed. | |
| bool | needsVelocityUpdate () const |
| Returns true iff a velocity update is needed for this Entity. | |
| virtual void | notifyAccelerationUpdate () |
| Notify the acceleration of this Entity that its parent Frame's acceleration is needed. | |
| bool | needsAccelerationUpdate () const |
| Returns true iff an acceleration update is needed for this Entity. | |
Static Public Member Functions | |
| static Frame * | World () |
| static std::shared_ptr< Frame > | WorldShared () |
Protected Types | |
| enum | ConstructAbstractTag { ConstructAbstract } |
| Used when constructing a pure abstract class, because calling the Frame constructor is just a formality. More... | |
| enum | ConstructFrameTag { ConstructFrame } |
| Used when constructing a Frame class, because the Frame constructor will take care of setting up the parameters you pass into it. More... | |
Protected Member Functions | |
| virtual void | changeParentFrame (Frame *_newParentFrame) override |
| Used by derived classes to change their parent frames. | |
| virtual void | processNewEntity (Entity *_newChildEntity) |
| Called during a parent Frame change to allow extensions of the Frame class to handle new children in customized ways. | |
| virtual void | processRemovedEntity (Entity *_oldChildEntity) |
| Called when a child Entity is removed from its parent Frame. | |
| void | sendDestructionNotification () const |
| Send a destruction notification to all Observers. | |
| void | addObserver (Observer *_observer) const |
| Add an Observer to the list of Observers. | |
| void | removeObserver (Observer *_observer) const |
| Remove an Observer from the list of Observers. | |
Protected Attributes | |
| Eigen::Isometry3d | mWorldTransform |
| World transform of this Frame. | |
| Eigen::Vector6d | mVelocity |
| Total velocity of this Frame, in the coordinates of this Frame. | |
| Eigen::Vector6d | mAcceleration |
| Total acceleration of this Frame, in the coordinates of this Frame. | |
| std::set< Frame * > | mChildFrames |
| Container of this Frame's child Frames. | |
| std::set< Entity * > | mChildEntities |
| Container of this Frame's child Entities. | |
| Frame * | mParentFrame |
| Parent frame of this Entity. | |
| bool | mNeedTransformUpdate |
| Does this Entity need a Transform update. | |
| bool | mNeedVelocityUpdate |
| Does this Entity need a Velocity update. | |
| bool | mNeedAccelerationUpdate |
| Does this Entity need an Acceleration update. | |
| FrameChangedSignal | mFrameChangedSignal |
| Frame changed signal. | |
| NameChangedSignal | mNameChangedSignal |
| Name changed signal. | |
| EntitySignal | mTransformUpdatedSignal |
| Transform changed signal. | |
| EntitySignal | mVelocityChangedSignal |
| Velocity changed signal. | |
| EntitySignal | mAccelerationChangedSignal |
| Acceleration changed signal. | |
| std::set< Observer * > | mObservers |
| List of current Observers. | |
Private Types | |
| enum | ConstructWorldTag { ConstructWorld } |
| Used when constructing the World. More... | |
Private Member Functions | |
| WorldFrame () | |
| This may only be constructed by the Frame class. | |
Private Attributes | |
| const Eigen::Isometry3d | mRelativeTf |
| This is set to Identity and never changes. | |
| const bool | mAmWorld |
| Contains whether or not this is the World Frame. | |
| bool | mAmShapeFrame |
| Contains whether or not this is a ShapeFrame. | |
Static Private Attributes | |
| static const Eigen::Vector6d | mZero = Eigen::Vector6d::Zero() |
| This is set to a Zero vector and never changes. | |
Friends | |
| class | Frame |
Slot registers | |
| const bool | mAmQuiet |
| Whether or not this Entity is set to be quiet. | |
| bool | mAmFrame |
| Whether or not this Entity is a Frame. | |
| common::SlotRegister< FrameChangedSignal > | onFrameChanged |
| Slot register for frame changed signal. | |
| common::SlotRegister< NameChangedSignal > | onNameChanged |
| Slot register for name changed signal. | |
| common::SlotRegister< EntitySignal > | onTransformUpdated |
| Slot register for transform updated signal. | |
| common::SlotRegister< EntitySignal > | onVelocityChanged |
| Slot register for velocity updated signal. | |
| common::SlotRegister< EntitySignal > | onAccelerationChanged |
| Slot register for acceleration updated signal. | |
Detailed Description
The WorldFrame class is a class that is used internally to create the singleton World Frame.
This class cannot be instantiated directly: you must use the Frame::World() function to access it. Only one World Frame exists in any application.
Member Typedef Documentation
◆ EntitySignal
|
inherited |
◆ FrameChangedSignal
|
inherited |
◆ NameChangedSignal
|
inherited |
Member Enumeration Documentation
◆ ConstructAbstractTag
|
protectedinherited |
Used when constructing a pure abstract class, because calling the Frame constructor is just a formality.
| Enumerator | |
|---|---|
| ConstructAbstract | |
◆ ConstructFrameTag
|
protectedinherited |
◆ ConstructWorldTag
|
privateinherited |
Constructor & Destructor Documentation
◆ WorldFrame()
|
explicitprivate |
This may only be constructed by the Frame class.
Member Function Documentation
◆ addObserver()
|
protectedinherited |
Add an Observer to the list of Observers.
◆ asShapeFrame() [1/2]
|
virtualinherited |
Convert 'this' into a ShapeFrame pointer if Frame is a ShapeFrame, otherwise return nullptr.
Reimplemented in dart::dynamics::ShapeFrame.
◆ asShapeFrame() [2/2]
|
virtualinherited |
Convert 'const this' into a ShapeFrame pointer if Frame is a ShapeFrame, otherwise return nullptr.
Reimplemented in dart::dynamics::ShapeFrame.
◆ changeParentFrame()
|
overrideprotectedvirtualinherited |
Used by derived classes to change their parent frames.
Reimplemented from dart::dynamics::Entity.
◆ descendsFrom()
|
inherited |
◆ dirtyAcceleration()
|
overridevirtualinherited |
Notify the acceleration updates of this Frame and all its children are needed.
Reimplemented from dart::dynamics::Entity.
Reimplemented in dart::dynamics::BodyNode.
◆ dirtyTransform()
|
overridevirtualinherited |
Notify the transformation updates of this Frame and all its children are needed.
Reimplemented from dart::dynamics::Entity.
Reimplemented in dart::dynamics::BodyNode.
◆ dirtyVelocity()
|
overridevirtualinherited |
Notify the velocity updates of this Frame and all its children are needed.
Reimplemented from dart::dynamics::Entity.
Reimplemented in dart::dynamics::BodyNode.
◆ getAngularAcceleration()
|
inherited |
◆ getAngularVelocity()
|
inherited |
◆ getChildEntities() [1/2]
|
inherited |
◆ getChildEntities() [2/2]
|
inherited |
Get a container with the Entities that are children of this Frame.
Note that this is version is slightly less efficient than the non-const version because it needs to rebuild a set where each pointer is converted to be a const pointer.
◆ getChildFrames() [1/2]
|
inherited |
◆ getChildFrames() [2/2]
|
inherited |
Get a container with the Frames that are children of this Frame.
Note that this version is less efficient than the non-const version because it needs to rebuild a set so that the entries are const.
◆ getLinearAcceleration() [1/2]
|
inherited |
◆ getLinearAcceleration() [2/2]
|
inherited |
◆ getLinearVelocity() [1/2]
|
inherited |
◆ getLinearVelocity() [2/2]
|
inherited |
◆ getName()
|
finaloverridevirtual |
Return the name of this Entity.
Implements dart::dynamics::Entity.
◆ getNumChildEntities()
|
inherited |
Get the number of Entities that are currently children of this Frame.
◆ getNumChildFrames()
|
inherited |
Get the number of Frames that are currently children of this Frame.
◆ getParentFrame() [1/2]
|
inherited |
Get the parent (reference) frame of this Entity.
◆ getParentFrame() [2/2]
|
inherited |
Get the parent (reference) frame of this Entity.
◆ getPartialAcceleration()
|
finaloverridevirtual |
Always returns a zero vector.
Implements dart::dynamics::Frame.
◆ getPrimaryRelativeAcceleration()
|
finaloverridevirtual |
Always returns a zero vector.
Implements dart::dynamics::Frame.
◆ getRelativeSpatialAcceleration()
|
finaloverridevirtual |
Always returns a zero vector.
Implements dart::dynamics::Frame.
◆ getRelativeSpatialVelocity()
|
finaloverridevirtual |
Always returns a zero vector.
Implements dart::dynamics::Frame.
◆ getRelativeTransform()
|
finaloverridevirtual |
Always returns the Identity Transform.
Implements dart::dynamics::Frame.
◆ getSpatialAcceleration() [1/4]
|
inherited |
◆ getSpatialAcceleration() [2/4]
|
inherited |
◆ getSpatialAcceleration() [3/4]
|
inherited |
Get the spatial acceleration of a fixed point in this Frame.
◆ getSpatialAcceleration() [4/4]
|
inherited |
◆ getSpatialVelocity() [1/4]
|
inherited |
◆ getSpatialVelocity() [2/4]
|
inherited |
◆ getSpatialVelocity() [3/4]
|
inherited |
Get the spatial velocity of a fixed point in this Frame.
◆ getSpatialVelocity() [4/4]
|
inherited |
◆ getTransform() [1/2]
|
inherited |
◆ getTransform() [2/2]
◆ getWorldTransform()
|
inherited |
◆ isFrame()
◆ isQuiet()
|
inherited |
Returns true if this Entity is set to be quiet.
A quiet entity is unknown to its parent Frame. It will not be tracked by its parent; it will not receive notifications from its parent, and it will not be rendered. The advantage to a quiet Entity is that it has less overhead when constructing and deconstructing, which makes it more suitable for temporary objects.
◆ isShapeFrame()
|
inherited |
Returns true if this Frame is a ShapeFrame.
◆ isWorld()
|
inherited |
◆ needsAccelerationUpdate()
|
inherited |
Returns true iff an acceleration update is needed for this Entity.
◆ needsTransformUpdate()
|
inherited |
Returns true iff a transform update is needed for this Entity.
◆ needsVelocityUpdate()
|
inherited |
Returns true iff a velocity update is needed for this Entity.
◆ notifyAccelerationUpdate()
|
virtualinherited |
◆ notifyTransformUpdate()
|
virtualinherited |
◆ notifyVelocityUpdate()
|
virtualinherited |
◆ processNewEntity()
|
protectedvirtualinherited |
Called during a parent Frame change to allow extensions of the Frame class to handle new children in customized ways.
This function is a no op unless an inheriting class (such as BodyNode) overrides it.
Reimplemented in dart::dynamics::BodyNode.
◆ processRemovedEntity()
|
protectedvirtualinherited |
Called when a child Entity is removed from its parent Frame.
This allows special post-processing to be performed for extensions of the Frame class.
Reimplemented in dart::dynamics::BodyNode.
◆ removeObserver()
|
protectedinherited |
Remove an Observer from the list of Observers.
◆ sendDestructionNotification()
|
protectedinherited |
Send a destruction notification to all Observers.
This will cause all Observers to behave as if this Subject has been permanently deleted, so it should only be called when that behavior is desired.
◆ setName()
|
finaloverridevirtual |
Set name.
Some implementations of Entity may make alterations to the name that gets passed in. The final name that this entity will use gets passed back in the return of this function.
Implements dart::dynamics::Entity.
◆ World()
|
staticinherited |
◆ WorldShared()
|
staticinherited |
Friends And Related Symbol Documentation
◆ Frame
|
friend |
Member Data Documentation
◆ mAcceleration
|
mutableprotectedinherited |
Total acceleration of this Frame, in the coordinates of this Frame.
Do not use directly! Use getSpatialAcceleration() to access this quantity
◆ mAccelerationChangedSignal
|
protectedinherited |
Acceleration changed signal.
◆ mAmFrame
◆ mAmQuiet
|
privateinherited |
Whether or not this Entity is set to be quiet.
◆ mAmShapeFrame
|
privateinherited |
Contains whether or not this is a ShapeFrame.
◆ mAmWorld
|
privateinherited |
Contains whether or not this is the World Frame.
◆ mChildEntities
|
protectedinherited |
Container of this Frame's child Entities.
◆ mChildFrames
|
protectedinherited |
Container of this Frame's child Frames.
◆ mFrameChangedSignal
|
protectedinherited |
Frame changed signal.
◆ mNameChangedSignal
|
protectedinherited |
Name changed signal.
◆ mNeedAccelerationUpdate
|
mutableprotectedinherited |
Does this Entity need an Acceleration update.
◆ mNeedTransformUpdate
|
mutableprotectedinherited |
Does this Entity need a Transform update.
◆ mNeedVelocityUpdate
|
mutableprotectedinherited |
Does this Entity need a Velocity update.
◆ mObservers
|
mutableprotectedinherited |
List of current Observers.
◆ mParentFrame
◆ mRelativeTf
|
private |
This is set to Identity and never changes.
◆ mTransformUpdatedSignal
|
protectedinherited |
Transform changed signal.
◆ mVelocity
|
mutableprotectedinherited |
Total velocity of this Frame, in the coordinates of this Frame.
Do not use directly! Use getSpatialVelocity() to access this quantity
◆ mVelocityChangedSignal
|
protectedinherited |
Velocity changed signal.
◆ mWorldTransform
|
mutableprotectedinherited |
World transform of this Frame.
This object is mutable to enable auto-updating to happen in the const member getWorldTransform() function
Do not use directly! Use getWorldTransform() to access this quantity
◆ mZero
|
staticprivate |
This is set to a Zero vector and never changes.
◆ onAccelerationChanged
|
inherited |
Slot register for acceleration updated signal.
◆ onFrameChanged
|
inherited |
Slot register for frame changed signal.
◆ onNameChanged
|
inherited |
Slot register for name changed signal.
◆ onTransformUpdated
|
inherited |
Slot register for transform updated signal.
◆ onVelocityChanged
|
inherited |
Slot register for velocity updated signal.