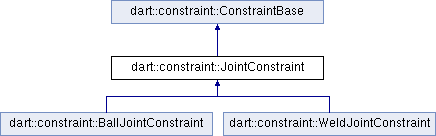
class JointConstraint More...
#include <JointConstraint.hpp>
Public Member Functions | |
| JointConstraint (dynamics::BodyNode *_body) | |
| Contructor. | |
| JointConstraint (dynamics::BodyNode *_body1, dynamics::BodyNode *_body2) | |
| Contructor. | |
| virtual | ~JointConstraint () |
| Destructor. | |
| dynamics::BodyNode * | getBodyNode1 () const |
| Get the first BodyNode that this constraint is associated with. | |
| dynamics::BodyNode * | getBodyNode2 () const |
| Get the second BodyNode that this constraint is associated with. | |
| virtual const std::string & | getType () const |
| Returns a string representing the constraint type. | |
| std::size_t | getDimension () const |
| Return dimesion of this constranit. | |
| virtual void | update ()=0 |
| Update constraint using updated Skeleton's states. | |
| virtual void | getInformation (ConstraintInfo *info)=0 |
| Fill LCP variables. | |
| virtual void | applyUnitImpulse (std::size_t index)=0 |
| Apply unit impulse to constraint space. | |
| virtual void | getVelocityChange (double *vel, bool withCfm)=0 |
| Get velocity change due to the uint impulse. | |
| virtual void | excite ()=0 |
| Excite the constraint. | |
| virtual void | unexcite ()=0 |
| Unexcite the constraint. | |
| virtual void | applyImpulse (double *lambda)=0 |
| Apply computed constraint impulse to constrained skeletons. | |
| virtual bool | isActive () const =0 |
| Return true if this constraint is active. | |
| virtual dynamics::SkeletonPtr | getRootSkeleton () const =0 |
| virtual void | uniteSkeletons () |
Static Public Member Functions | |
| static void | setErrorAllowance (double _allowance) |
| Set global error reduction parameter. | |
| static double | getErrorAllowance () |
| Get global error reduction parameter. | |
| static void | setErrorReductionParameter (double _erp) |
| Set global error reduction parameter. | |
| static double | getErrorReductionParameter () |
| Get global error reduction parameter. | |
| static void | setMaxErrorReductionVelocity (double _erv) |
| Set global error reduction parameter. | |
| static double | getMaxErrorReductionVelocity () |
| Get global error reduction parameter. | |
| static void | setConstraintForceMixing (double _cfm) |
| Set global constraint force mixing parameter. | |
| static double | getConstraintForceMixing () |
| Get global constraint force mixing parameter. | |
| static dynamics::SkeletonPtr | getRootSkeleton (dynamics::SkeletonPtr skeleton) |
| static dynamics::SkeletonPtr | compressPath (dynamics::SkeletonPtr skeleton) |
Protected Attributes | |
| dynamics::BodyNode * | mBodyNode1 |
| First body node. | |
| dynamics::BodyNode * | mBodyNode2 |
| Second body node. | |
| std::size_t | mDim |
| Dimension of constraint. | |
Static Protected Attributes | |
| static double | mErrorAllowance = 0.0 |
| Global constraint error allowance. | |
| static double | mErrorReductionParameter = 0.01 |
| Global constraint error redection parameter in the range of [0, 1]. | |
| static double | mMaxErrorReductionVelocity = 1e+1 |
| Maximum error reduction velocity. | |
| static double | mConstraintForceMixing = 1e-9 |
| Global constraint force mixing parameter in the range of [1e-9, 1]. | |
Detailed Description
class JointConstraint
Constructor & Destructor Documentation
◆ JointConstraint() [1/2]
|
explicit |
Contructor.
◆ JointConstraint() [2/2]
| dart::constraint::JointConstraint::JointConstraint | ( | dynamics::BodyNode * | _body1, |
| dynamics::BodyNode * | _body2 | ||
| ) |
Contructor.
◆ ~JointConstraint()
|
virtual |
Destructor.
Member Function Documentation
◆ applyImpulse()
|
pure virtualinherited |
Apply computed constraint impulse to constrained skeletons.
Implemented in dart::constraint::BallJointConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::SoftContactConstraint, dart::constraint::WeldJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, and dart::constraint::ServoMotorConstraint.
◆ applyUnitImpulse()
|
pure virtualinherited |
Apply unit impulse to constraint space.
Implemented in dart::constraint::SoftContactConstraint, dart::constraint::BallJointConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::WeldJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, and dart::constraint::ServoMotorConstraint.
◆ compressPath()
|
staticinherited |
◆ excite()
|
pure virtualinherited |
Excite the constraint.
Implemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
◆ getBodyNode1()
| dynamics::BodyNode * dart::constraint::JointConstraint::getBodyNode1 | ( | ) | const |
Get the first BodyNode that this constraint is associated with.
◆ getBodyNode2()
| dynamics::BodyNode * dart::constraint::JointConstraint::getBodyNode2 | ( | ) | const |
Get the second BodyNode that this constraint is associated with.
◆ getConstraintForceMixing()
|
static |
Get global constraint force mixing parameter.
◆ getDimension()
|
inherited |
Return dimesion of this constranit.
◆ getErrorAllowance()
|
static |
Get global error reduction parameter.
◆ getErrorReductionParameter()
|
static |
Get global error reduction parameter.
◆ getInformation()
|
pure virtualinherited |
Fill LCP variables.
Implemented in dart::constraint::SoftContactConstraint, dart::constraint::BallJointConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::WeldJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, and dart::constraint::ServoMotorConstraint.
◆ getMaxErrorReductionVelocity()
|
static |
Get global error reduction parameter.
◆ getRootSkeleton() [1/2]
|
pure virtualinherited |
Implemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
◆ getRootSkeleton() [2/2]
|
staticinherited |
◆ getType()
|
virtualinherited |
Returns a string representing the constraint type.
Reimplemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
◆ getVelocityChange()
|
pure virtualinherited |
Get velocity change due to the uint impulse.
Implemented in dart::constraint::JointCoulombFrictionConstraint, dart::constraint::BallJointConstraint, dart::constraint::SoftContactConstraint, dart::constraint::WeldJointConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, and dart::constraint::ContactConstraint.
◆ isActive()
|
pure virtualinherited |
Return true if this constraint is active.
Implemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
◆ setConstraintForceMixing()
|
static |
Set global constraint force mixing parameter.
◆ setErrorAllowance()
|
static |
Set global error reduction parameter.
◆ setErrorReductionParameter()
|
static |
Set global error reduction parameter.
◆ setMaxErrorReductionVelocity()
|
static |
Set global error reduction parameter.
◆ unexcite()
|
pure virtualinherited |
Unexcite the constraint.
Implemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
◆ uniteSkeletons()
|
virtualinherited |
◆ update()
|
pure virtualinherited |
Update constraint using updated Skeleton's states.
Implemented in dart::constraint::BallJointConstraint, dart::constraint::ContactConstraint, dart::constraint::JointCoulombFrictionConstraint, dart::constraint::JointLimitConstraint, dart::constraint::MimicMotorConstraint, dart::constraint::ServoMotorConstraint, dart::constraint::SoftContactConstraint, and dart::constraint::WeldJointConstraint.
Member Data Documentation
◆ mBodyNode1
|
protected |
First body node.
◆ mBodyNode2
|
protected |
Second body node.
◆ mConstraintForceMixing
|
staticprotected |
Global constraint force mixing parameter in the range of [1e-9, 1].
The default is 1e-5
◆ mDim
|
protectedinherited |
Dimension of constraint.
◆ mErrorAllowance
|
staticprotected |
Global constraint error allowance.
◆ mErrorReductionParameter
|
staticprotected |
Global constraint error redection parameter in the range of [0, 1].
The default is 0.01.
◆ mMaxErrorReductionVelocity
|
staticprotected |
Maximum error reduction velocity.