Software
| Thumbnail | Software |
|---|---|
 |
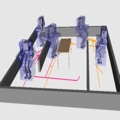
Gazebo Gazebo simulates multipe robots in a 3D environment, with extensive dynamic integration between objects. Gazebo supports multiple physics engines: ODE, Bullet, DART, and Simbody. website, source on bitbucket |
| PyDART2 PyDART2 is an open source python binding of DART, an open source physics simulator. Its APIs are designed to provide concise and powerful control on DART physics worlds. Further, a user can write simulations with a numerous python scientific libraries, such as NumPy(linear algebra), SciPy(optimization), scikit-learn (machine learning), PyBrain(machine learning), and so on. (website) |
|
| AIKIDO a C++ library, complete with Python bindings, for solving robotic motion planning and decision making problems. This library is tightly integrated with DART for kinematic/dynamics calculations and OMPL for motion planning. |
|
| libcozmo C++ library for simulating and running Cozmo based on DART and AIKIDO |
|
| robot_dart A generic and lightweight wrapper over DART simulator for fast and flexible robot simulations. |
Academic Research
This is a curated list of research publications using DART. More research papers cited DART can be found at Google Scholar.
| Thumbnail | Papers |
|---|---|
 |
Chatzilygeroudis, K., & Mouret, J. B. (2018). Using Parameterized Black-Box Priors to Scale Up Model-Based Policy Search for Robotics. Proceedings of the International Conference on Robotics and Automation (ICRA). |
 |
Pautrat, R., Chatzilygeroudis, K., & Mouret, J.-B. (2018). Bayesian Optimization with Automatic Prior Selection for Data-Efficient Direct Policy Search. Proceedings of the International Conference on Robotics and Automation (ICRA). |
 |
Supratik P., Chatzilygeroudis K., Ciosek K., Mouret JB., Osborne M., and Whiteson Sh. (2018). Alternating Optimisation and Quadrature for Robust Control. Proceedings of AAAI Conference on Artificial Intelligence. |
 |
Chatzilygeroudis, K., Vassiliades, V. and Mouret, J.-B. (2017). Reset-free Trial-and-Error Learning for Robot Damage Recovery. Robotics and Autonomous Systems. |
 |
Data-Driven Approach to Simulating Realistic Human Joint Constraints, Yifeng Jiang and C. Karen Liu , Preprint, 2017 arXiv |
 |
Multi-task Learning with Gradient Guided Policy Specialization, Wenhao Yu, Greg Turk, and C. Karen Liu , Preprint, 2017 arXiv |
 |
Learning Human Behaviors for Robot-Assisted Dressing, Alexander Clegg, Wenhao Yu, Jie Tan, Charlie C. Kemp, Greg Turk, and C. Karen Liu , Preprint, 2017 arXiv |
 |
Expanding Motor Skills through Relay Neural Networks, Visak C.V. Kumar, Sehoon Ha, and C. Karen Liu, Preprint, 2017 arXiv |
 |
Stair negotiation made easier using novel interactive energy-recycling assistive stairs, Yun Seong Song, Sehoon Ha, Hsiang Hsu, Lena H. Ting, and C. Karen Liu, in PLOS ONE, 2017 link |
 |
Learning a Unified Control Policy for Safe Falling, Visak C.V. Kumar, Sehoon Ha, and C. Karen Liu, Preprint, 2017 arXiv |
 |
Learning to Navigate Cloth using Haptics, Alexander Clegg, Wenhao Yu, Zackory Erickson, Jie Tan, C. Karen Liu, and Greg Turk, Preprint, 2017 arXiv |
 |
Preparing for the Unknown: Learning a Universal Policy with Online System Identification, Wenhao Yu, Jie Tan, C. Karen Liu, and Greg Turk, Preprint, 2017 arXiv |
 |
Vassiliades V., Chatzilygeroudis K., and Mouret JB. (2016). Using centroidal voronoi tessellations to scale up the multi-dimensional archive of phenotypic elites algorithm. IEEE Transactions on Evolutionary Computation. |
 |
A Linear-Time Variational Integrator for Multibody Systems, Jeongseok Lee, C. Karen Liu, Frank C. Park, and Siddhartha S. Srinivasa, Preprint, 2016 arXiv |
 |
Simulation-Based Design of Dynamic Controllers for Humanoid Balancing, Jie Tan, Zhaoming Xie, Byron Boots, and C. Karen Liu, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016 PDF |
 |
Humanoid Manipulation Planning using Backward-Forward Search, Michael X. Grey, Caelan R. Garrett, C. Karen Liu, Aaron D. Ames, and Andrea L. Thomaz, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016 PDF Video |
 |
Evolutionary Optimization for Parameterized Whole-body Dynamic Motor Skills, Sehoon Ha and C. Karen Liu, in IEEE International Conference on Robotics and Automation (ICRA) 2016 PDF Video |
 |
Dexterous Manipulation of Cloth, Yunfei Bai, Wenhao Yu (co-first author), and C. Karen Liu, in Computer Graphics Forum (Eurographics), 2016 PDF Video |
 |
Multiple Contact Planning for Minimizing Damage of Humanoid Falls, Sehoon Ha and C. Karen Liu, in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2015 |
 |
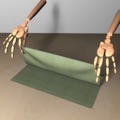
Animating Human Dressing, Alex Clegg, Jia Tan, Greg Turk, and C. Karen Liu, in Transactions on Graphics (SIGGRAPH), 2015 |
 |
Coupling Cloth and Rigid Bodies for Dexterous Manipulation, Yunfei Bai and C. Karen Liu, in Motion in Games, 2014 (Best Student Paper Award) |
 |
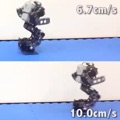
Orienting in Mid-air through Configuration Changes to Achieve a Rolling Landing for Reducing Impact after a Fall, Jeffrey T. Bingham, Jeongseok Lee, Ravi N. Haksar, Jun Ueda, and C. Karen Liu, in IEEE/RSJ International Conference on Intelligent Robots and Systems, 2014 |
 |
Dexterous Manipulation Using Both Palm and Fingers, Yunfei Bai and C. Karen Liu, in IEEE International Conference on Robotics and Automation, 2014 |
 |
Synthesis of Concurrent Object Manipulation Tasks, Yunfei Bai, Kristin Siu and C. Karen Liu, in ACM Transactions on Graphics (presented at SIGGRAPH Asia), 2012 |